【第4回ロボット教室】2014年10月11日レポート

この日は、ロボットの「目」となるセンサーの使い方を学びました。
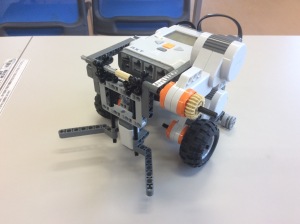
光センサー、タッチセンサーを取り付けたロボットでライントレースを行いました。
今回使用したロボットは、タッチセンサーを押すことでライントレースが始まり、ロボット前部につけたもう一つのタッチセンサーを押すことでロボットが停止、さらにはライン上に同時に走らせても追いついたら自動ブレーキがかかるようにしたものです。
これを実際に動作させることで、センサーの働きとロボットの動作を学ぶことが出来ました。