第6回ロボット教室・2016年9月25日レポート
前回から間をおかずに3回目が始まりました。
2回目から日が浅いので、忘れてない子も多いはず

最初にロボットクラブでの活動の様子を紹介しました。
今やっているロボットでできることは無限大です。
ちなみに活動内容はマシン2台を使って、ラジコンカーを作って走らせていました。
みんな興味津々でした。
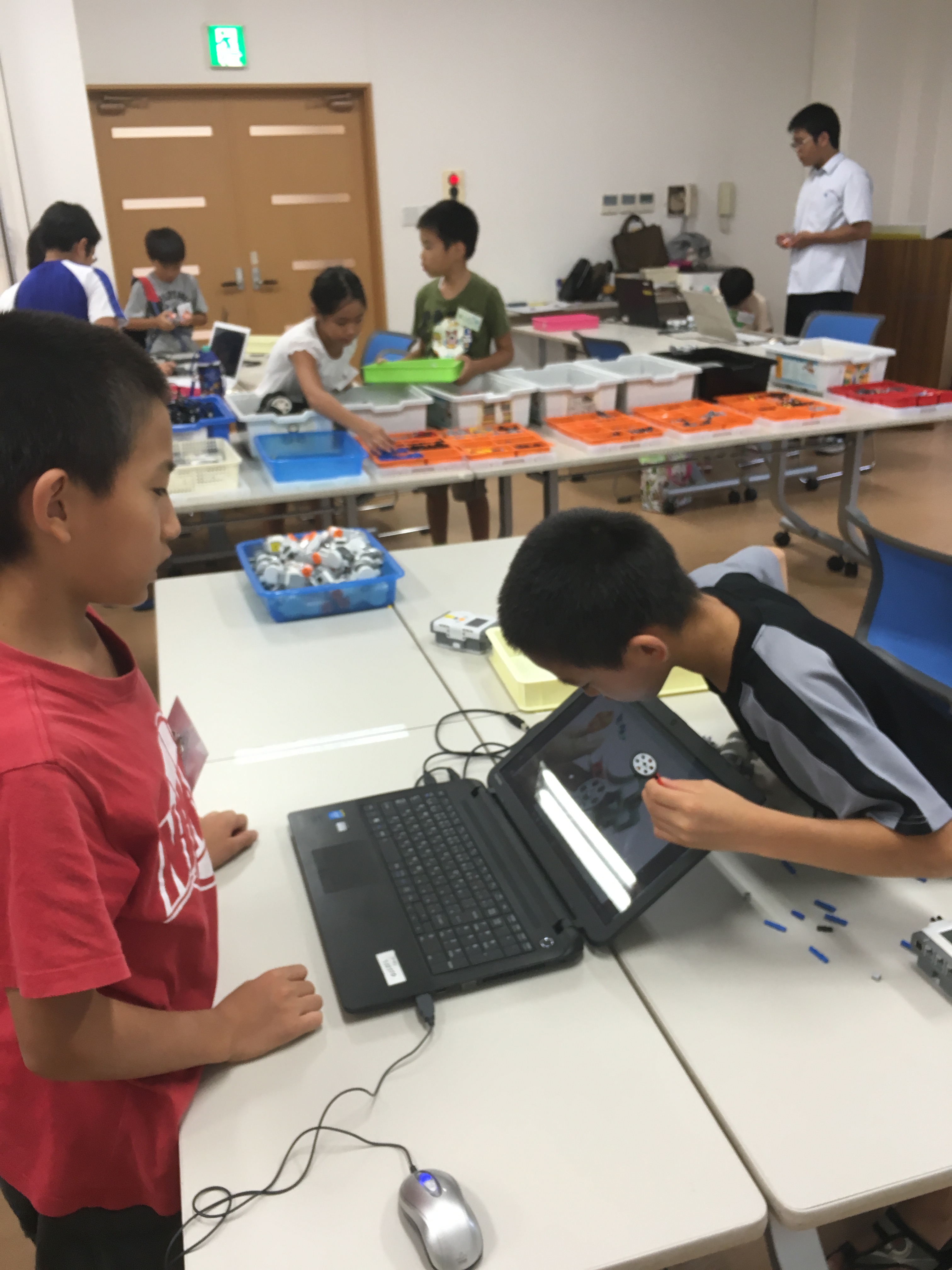
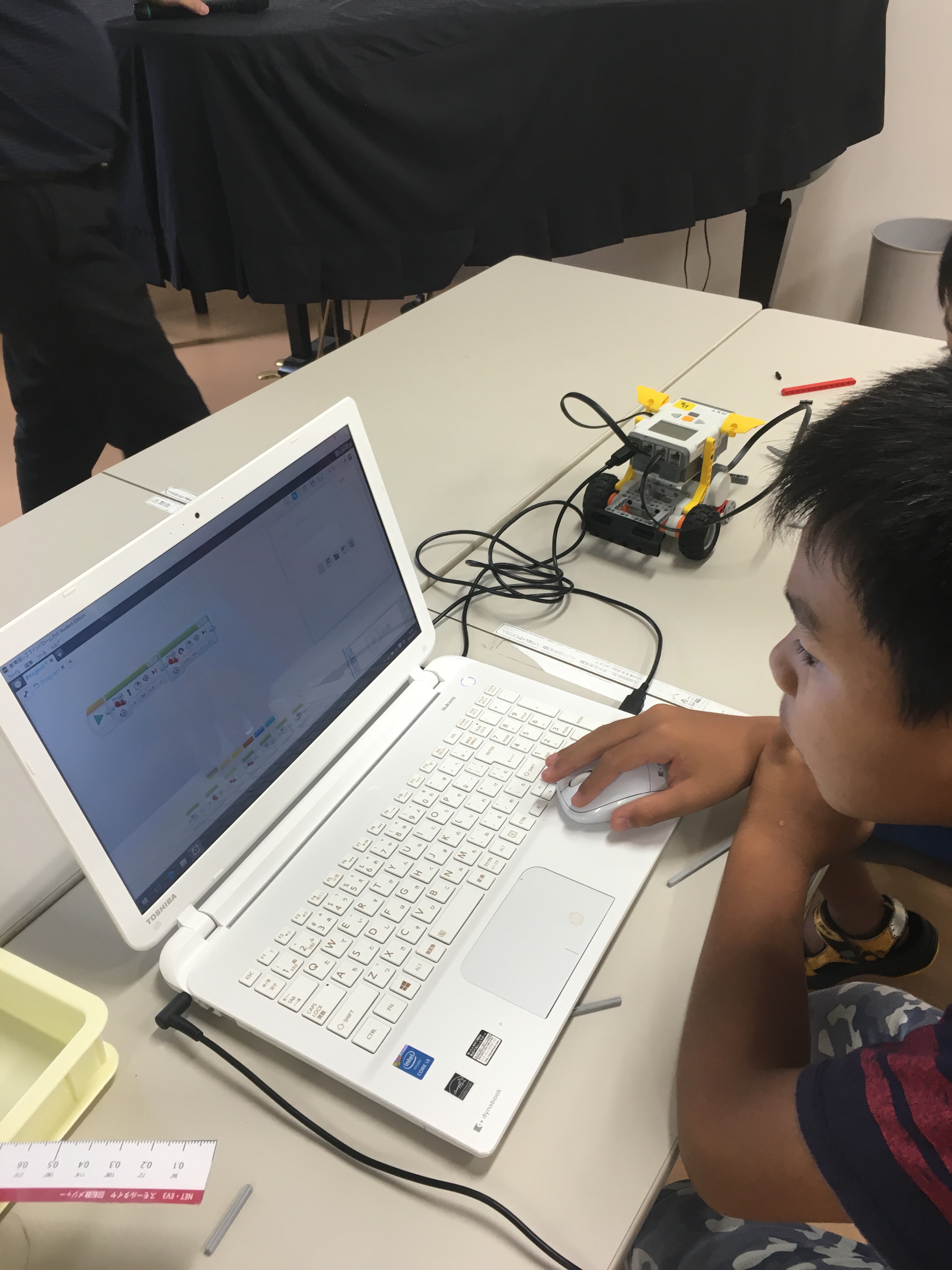 さぁ、今回も組み立ててプログラミングをしてロボットを動かします。
さぁ、今回も組み立ててプログラミングをしてロボットを動かします。
早く作りたくてPCを逆さまから覗き込んだり、ロボットを前とは違うデザインに組み上げたり、
課題をクリアしたくてプログラミングに取り組んだりと、それぞれ自分の興味のある分野から準備してました。

課題は今回まで同じです。
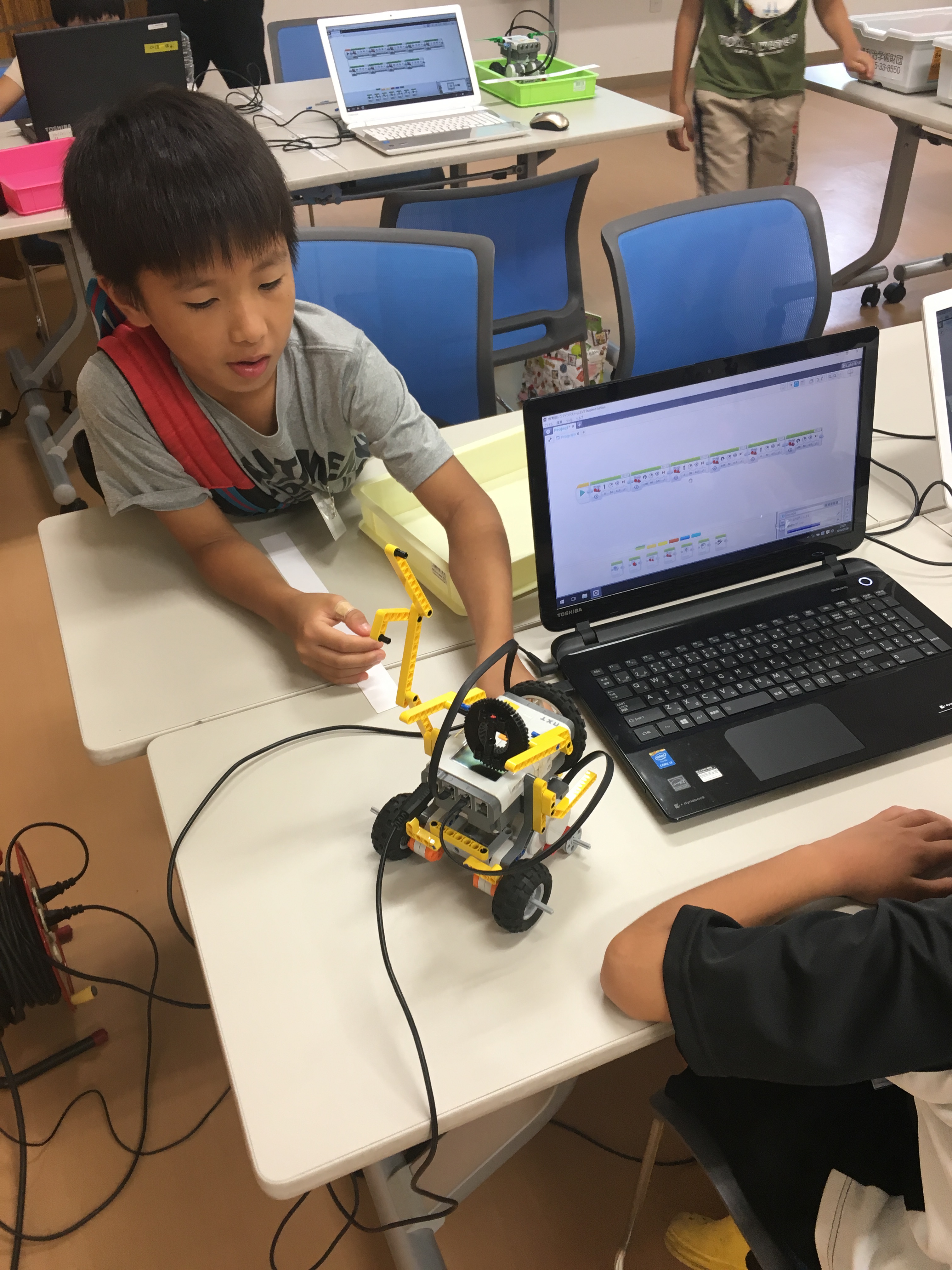
が、今回はより効率的に進めようとロボットのすすむ距離を制御するために
物差しを使って調べる人たちが出てきました。
またその物差しを使ってロボットのスタート位置をいつも合わせるチームも出てきました。
スタートの位置が微妙にずれるとロボットの動きもずれてしまうのです。
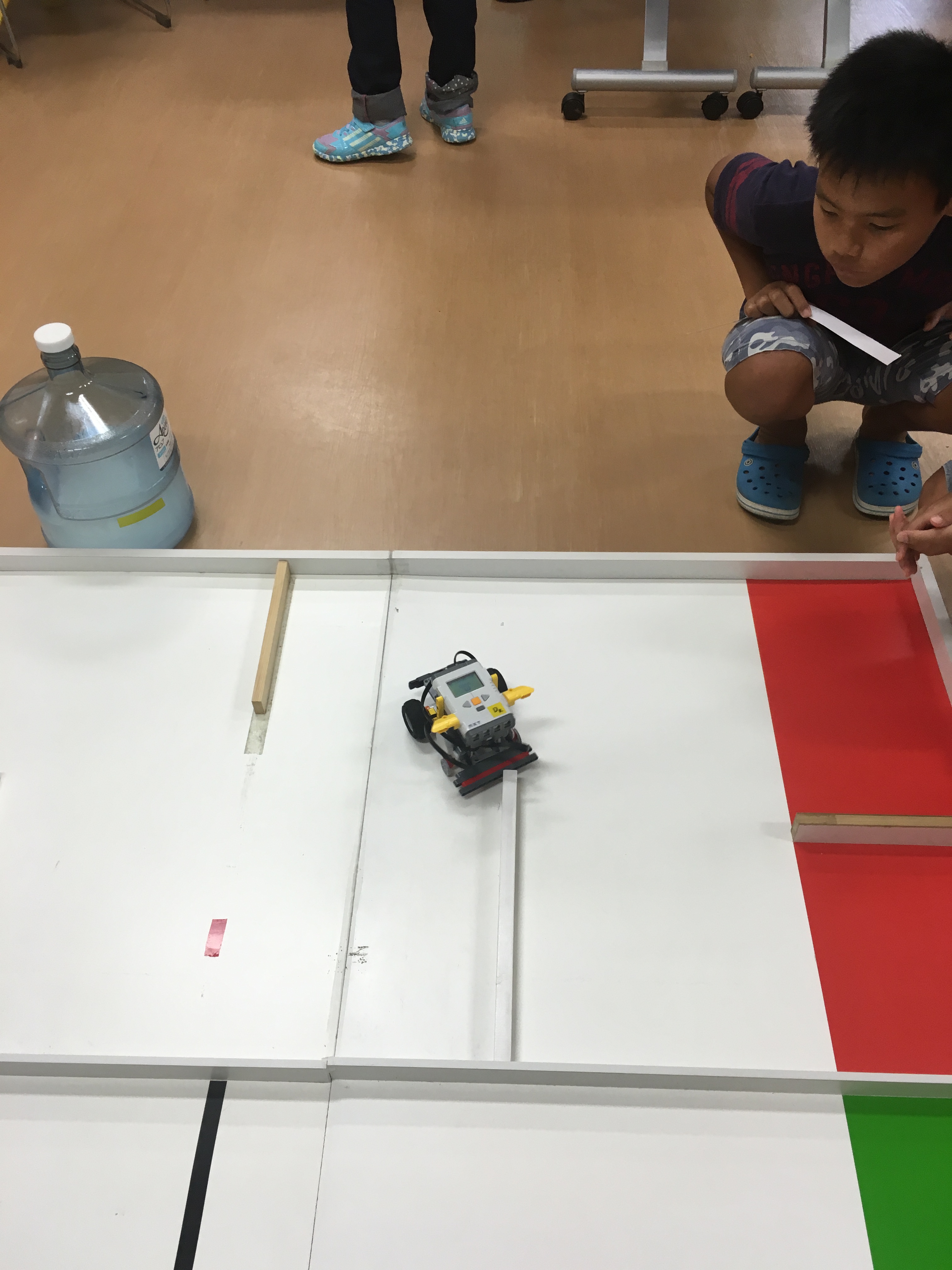
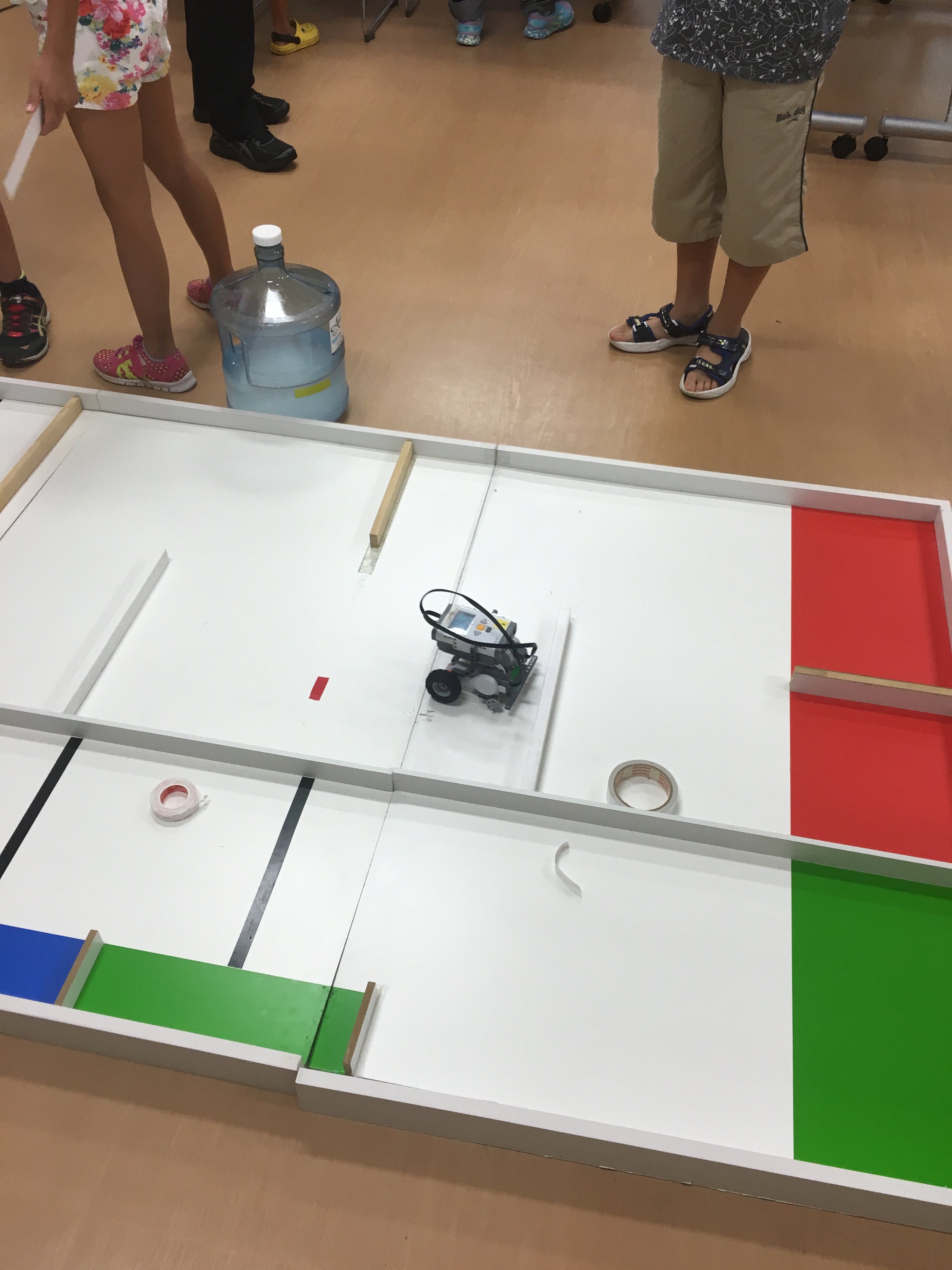
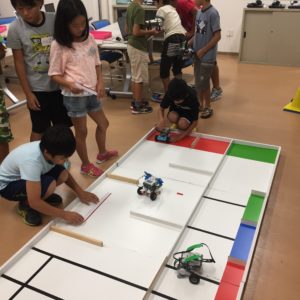
ロボットを正確に移動させるテクニックとして、壁打ちを今回は学びました。
上の写真は壁打ちに失敗しちゃいましたが、下の写真のように壁にすすむことでロボットを
まっすぐに補正するテクニックです。
全国大会でもよく使われている基本中の基本です。
3回に渡って基礎を練習し、
新しいテクニックも学んだところで、みんなロボットの基本がわかってきたようです。