第6回ロボット教室・2016年10月10日レポート
最近、急に冷え込んできました。
皆さんも風邪ひかないように気を付けてください。
10月10日のレポートです。
今回のプログラムは2部構成でした。
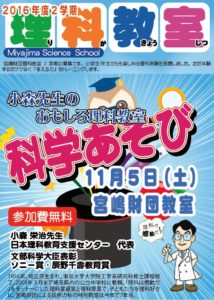
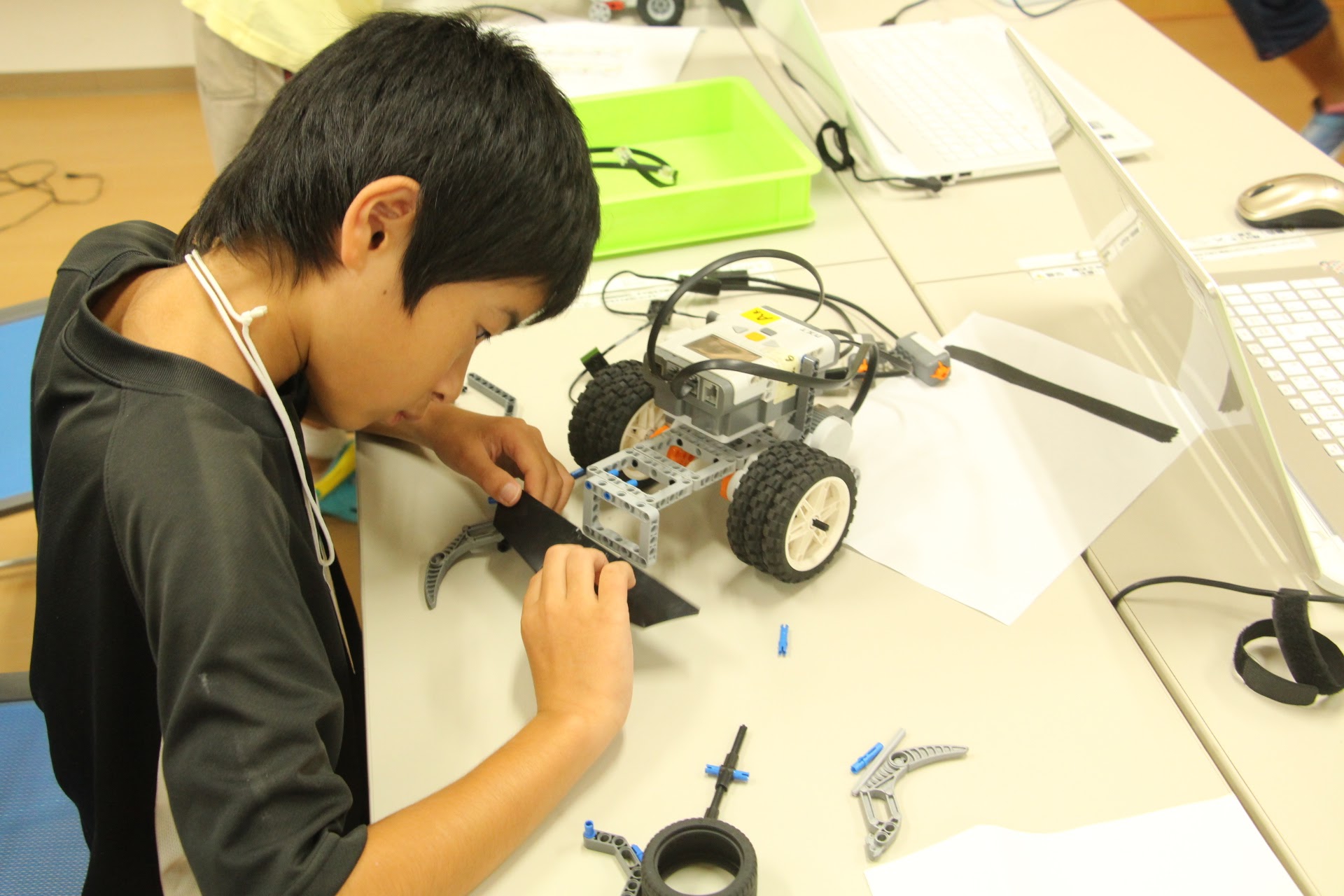
最初は、ロボットの五感とも言える光センサーと超音波センサーの使い方を学びました。
こちらの写真に写ってるロボットは黒い線を感知して、線に沿うように進み、目の前に障害物があったら止まるという動作をしています。
線に沿って進む技術はライントレースと呼ばれ、ロボット制御の基本中の基本です。
また、超音波センサーを使って障害物の検知をしています。
みんな初めてのことで戸惑っていましたが、無事動かすことができました。

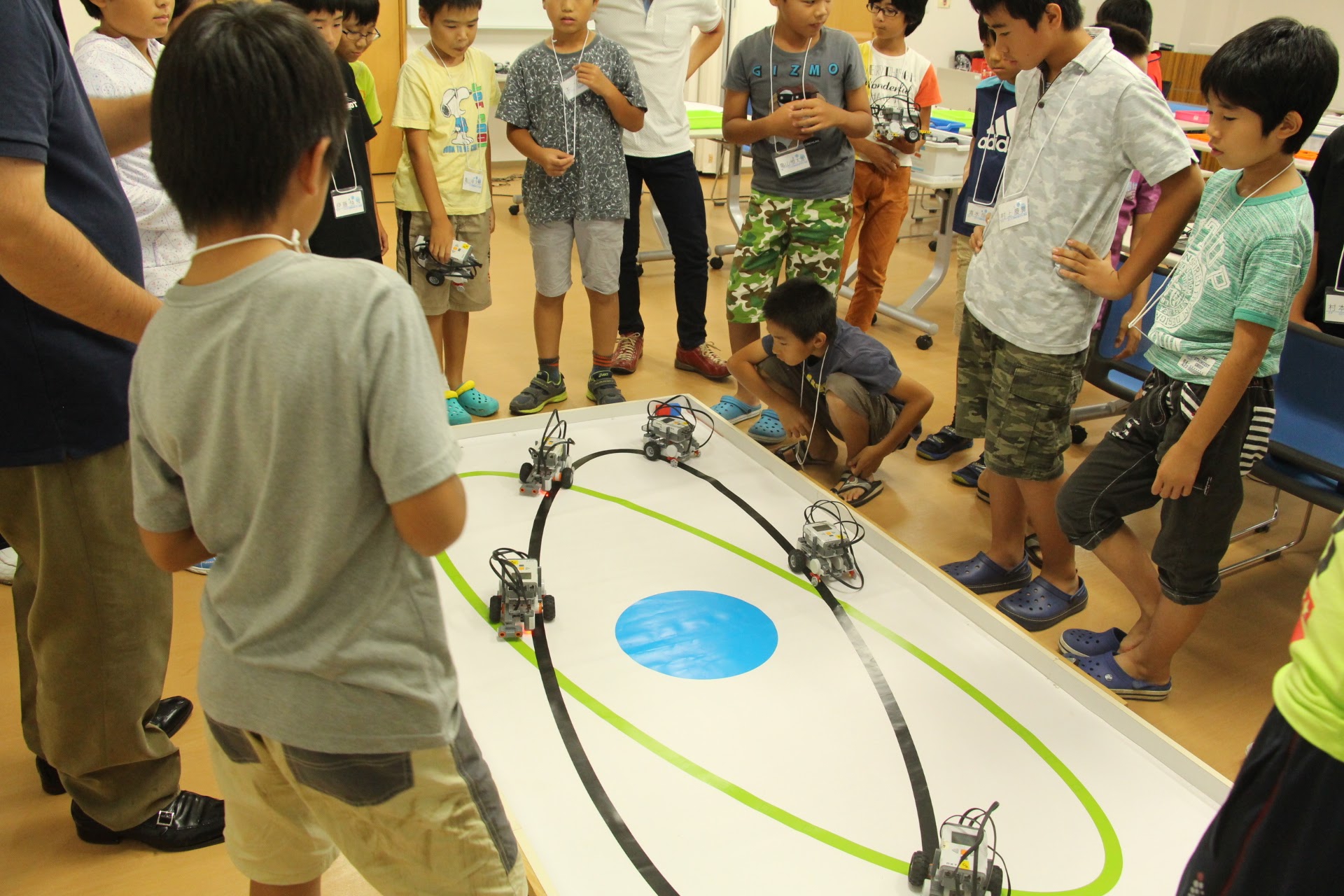
後半は写真のようなロボット相撲大会をやりました。
自分でロボットを動かして相手を落とすというルールでみんな盛り上がっていました。
新しいことばっかり学んでも疲れますからね。
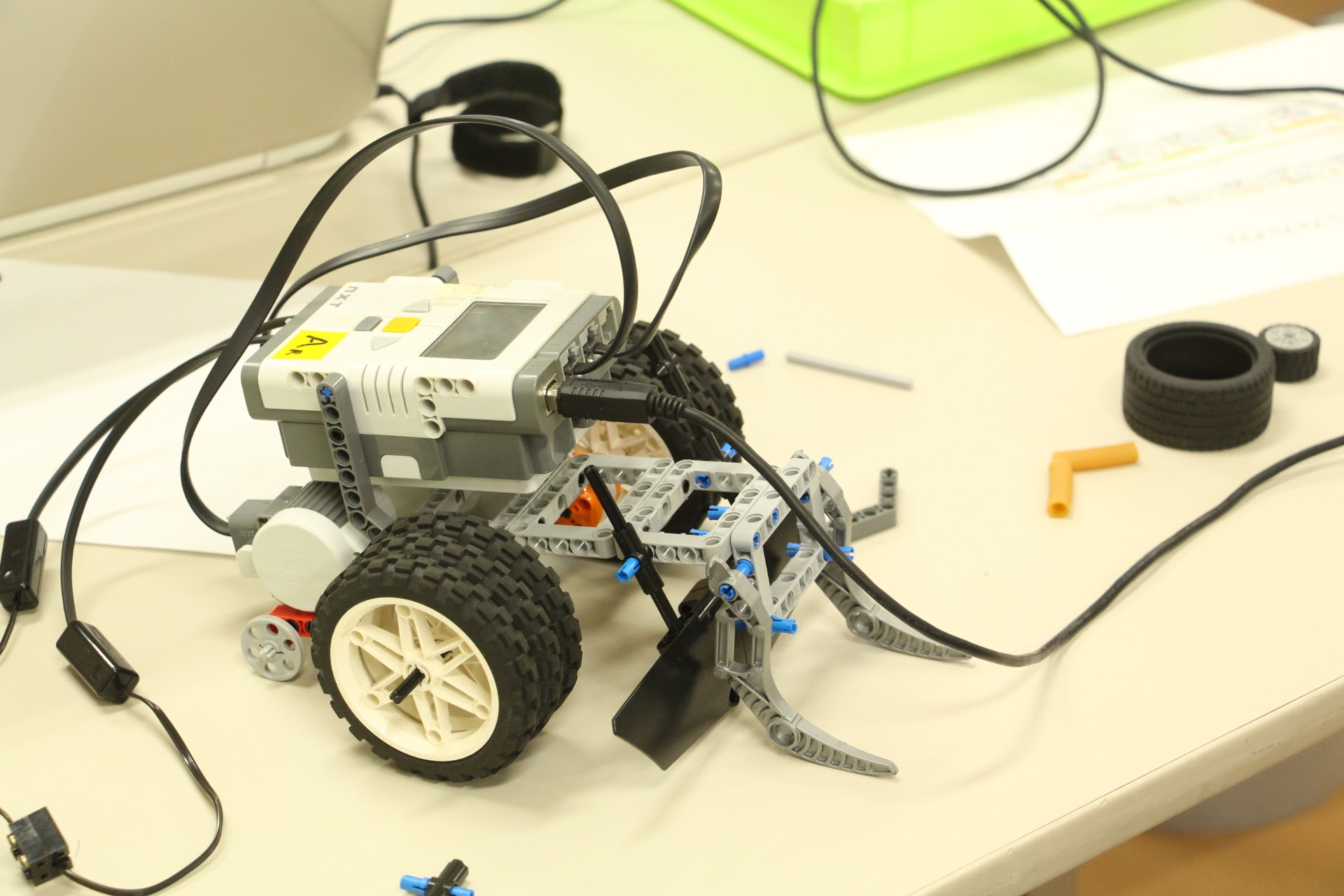
ロボット教室も4回目で部品に慣れてきたのか、個性的なマシーンがどんどん増えてきました。
こどもたちの創造性を伸ばすこともこのロボット相撲の目的の一つです。

気が付いたら土俵にはこどもたちが集まっていました。
大盛り上がりでみんな楽しんでいました。
最後になりますが、
相撲で勝つにはどうしたらいいんだろう?
このセンサーをどう使ったらライントレースができるんだろう?
という風に、こどもたちが少しでも「なぜ?」と思ってくれたら幸いです。
その気持ちはロボットに限らずモノづくりには大切なのです。